Bienvenue sur le site du département EEA !
Le département EEA de l’Université de Montpellier est responsable des enseignements en Électronique, Énergie Électrique et Automatique.
C’est quoi l’EEA ?
Le sigle « EEA » signifie « Electronique, Energie électrique et Automatique ». Ce sont 3 domaines techniques complémentaires qui, ensemble, rendent possible la conception et la réalisation d’une grande part des objets technologiques qui nous entourent.
On montre ci-dessous une video qui montre les thématiques de l’EEA à travers quelques objets du quotidien (téléphone mobile, voiture autonome, etc …)
Nos formations
Les formations proposées sont la Licence EEA, le Master EEA, la Licence Pro AES et le Master SNS :
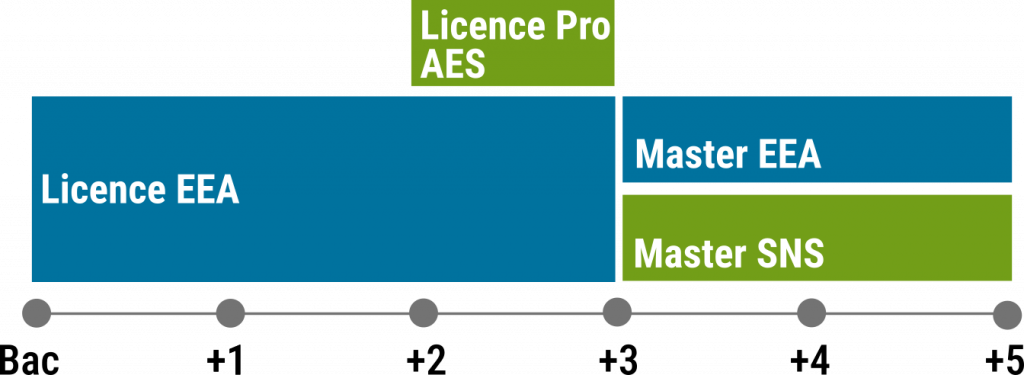
Elles ont des débouchés dans de nombreux secteurs industriels : robotique, télécommunications, électronique embarquée, production d’énergie, capteurs, photonique, optoélectronique …. (à étoffer). En outre, elles permettent d’accéder à une thèse de doctorat en laboratoire, dans les mêmes secteurs, mais à un niveau recherche.
La Licence EEA est une formation générale en Électronique qui mène à Bac+3 et aborde un tronc commun d’électronique et sensibilise aux diverses spécialités accessibles en Master (en savoir plus …).
Le Master EEA est la suite classique de la Licence EEA. Elle mène à Bac+5 et permet de se spécialiser dans un domaine d’expertise de l’EEA : Electrotechnique, Hyperfréquences et Optoélectronique, Microélectronique, Robotique, Capteurs et Systèmes Embarqués, Radiations (en savoir plus …).
La Licence Pro AES est une licence professionnelle. Elle mène donc à Bac+3 et prépare directement à la vie active, en orientant les étudiants dans les systèmes électroniques associés aux métiers du son et de l’audio (acoustique, …)
Le Master SNS est une formation qui mène à Bac+5. Elle forme de futurs cadres aux métiers des sciences et du numérique appliqués à la Médecine et la Santé. (en savoir plus …)
Depuis quelques années, la plupart des formations au niveau Master proposées par le département EEA, sont disponibles en apprentissage. Il s’agit d’un format dans lequel l’étudiant partage son temps entre les cours à l’université et le travail en entreprise.


